Hibakeresés
Bevezetés
A 2.1.0-rc1 óta a mag tartalmaz egy hibakeresési funkciót, amely az IDE menüből vezérelhető.
Az új menüpontok kezelik a valós idejű hibakeresési üzeneteket.
Követelmények
A hibakeresés használatához soros kapcsolat szükséges (Serial vagy Serial1).
A soros interfészt inicializálni kell a setup()-ban.
Állítsa be a soros adatátviteli sebességet a hardver beállításához a lehető legmagasabbra.
Minimális vázlat a hibakereséshez:
void setup() {
Serial.begin(115200);
}
void loop() {
}
Használat
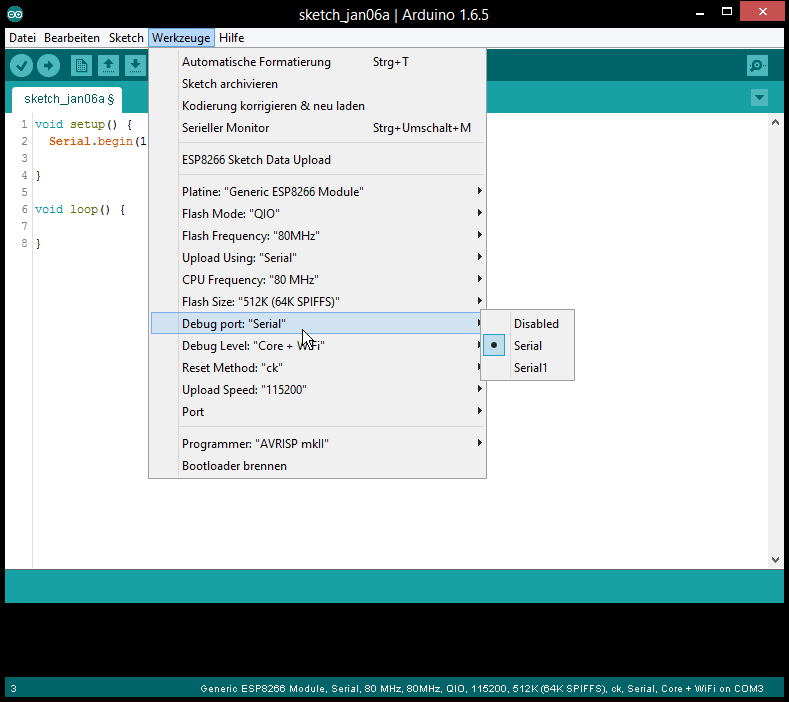
Válassza ki a soros interfészt a hibakeresési üzenetekhez:
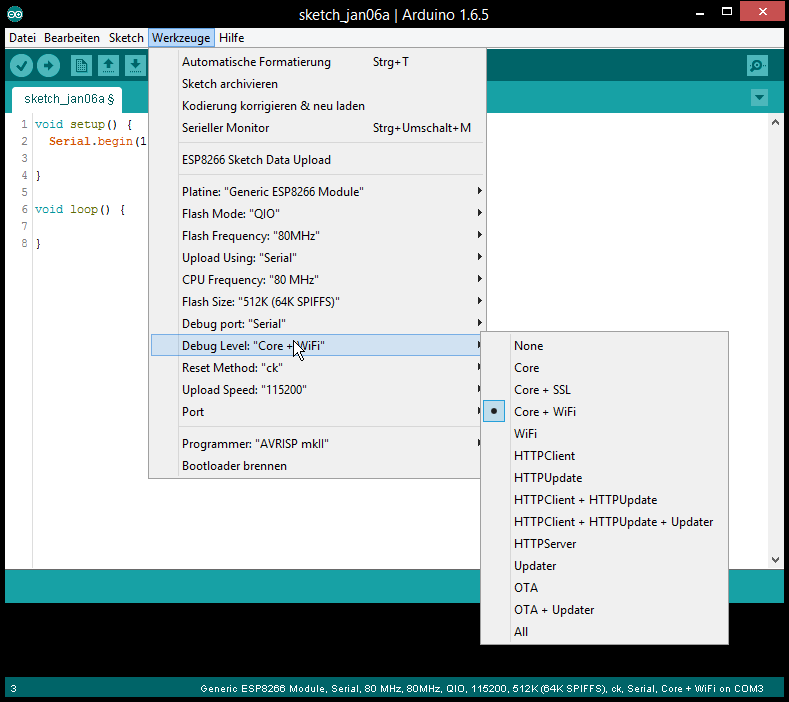
Válassza ki, melyik típushoz/szinthez szeretne hibakeresési üzeneteket küldeni:
Ellenőrizze, hogy a soros interfész inicializálva van-e a setup()-ban (lásd: Követelmények)
Villantsa a vázlatot
Ellenőrizze a soros kimenetet
Minden olyan vázlattal működik, amely lehetővé teszi a soros interfészt, amely hibakeresési portként van kiválasztva.
A soros interfész továbbra is normál módon használható a vázlatban.
A hibakeresési kimenet kiegészítő lehetőség, és nem tiltja le a vázlatban szereplő interfészek használatát.
Fejlesztőknek
A hibakeresés kezeléséhez használjon definíciókat.
A definiált értékeket parancssorral állítja be.
Hibakeresési port
A DEBUG_ESP_PORT portdefiníció lehetséges értékei: - Disabled: nem létező - Serial: Soros - Serial1: Soros1.
Hibakeresési szint
A különböző szintek összes definíciója a DEBUG_ESP_ karakterlánccal kezdődik.
a teljes lista itt található a boards.txt-ben
Példa saját hibakeresési üzenetekre
A hibakeresési üzenetek csak akkor jelennek meg, ha be van állítva a Debug Port az IDE menüben.
#ifdef DEBUG_ESP_PORT
#define DEBUG_MSG(...) DEBUG_ESP_PORT.printf( __VA_ARGS__ )
#else
#define DEBUG_MSG(...)
#endif
void setup() {
Serial.begin(115200);
delay(3000);
DEBUG_MSG("bootup...\n");
}
void loop() {
DEBUG_MSG("loop %d\n", millis());
delay(1000);
}
© Copyright 2017, Ivan Grokhotkov Revision b080c507. Fordította: Maczák András